MIT lab improves human and AUV interactions
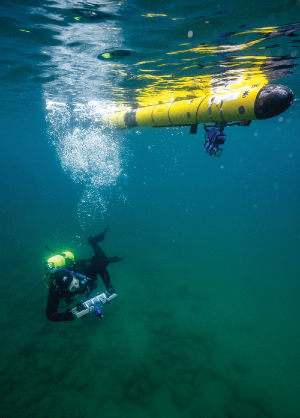
Researchers at MIT Lincoln Laboratory in the US are developing hardware and algorithms to improve collaboration between human divers and autonomous underwater vehicles (AUVs), with potential applications ranging from subsea cable inspection to countermine operations. The project, carried out by the lab’s Advanced Undersea Systems and Technology Group, seeks to combine the respective strengths of humans and robots in demanding underwater environments.
As principal investigator Madeline Miller notes, divers and AUVs generally do not team up at all underwater. Manipulation tasks requiring human dexterity, such as repairing infrastructure or deactivating a mine, fall entirely to the diver, while robotic systems offer advantages in processing power, endurance and high-speed mobility that remain largely unexploited in such missions.
The research addresses two fundamental capability gaps: underwater navigation and perception. Divers operating in low-visibility or deep conditions may have little more than a compass and fin-kick counts to guide them. For AUVs to assist meaningfully, they must perceive their environment reliably, yet optical sensors fail in dark or turbid water, and sonar imagery lacks colour and fine detail. The dynamic ocean environment can also confuse AI classification, as when a tyre overgrown with mussels no longer resembles a tyre, or a fragmented wreck no longer looks like an aircraft.
 |
|---|
The team built on navigation algorithms originally developed by MIT’s Marine Robotics Group, led by Professor John Leonard, integrating them into a mission-relevant AUV and progressing to trials with actual divers in open-ocean conditions. On the perception side, an AI classifier processes both optical and sonar data mid-mission, flagging low-confidence objects to the diver for human input via an underwater acoustic modem. A central engineering challenge is compressing information sufficiently to be useful within the severe bandwidth and latency constraints of underwater acoustic communications, while keeping hardware within the size, weight and power envelope of commercial off-the-shelf components.
After field trials in coastal New England waters and with human divers at Michigan Technological University’s Great Lakes Research Center, the team is seeking external sponsorship to transition the technology to military or commercial partners.
MIT’s Miller highlights the vulnerability of subsea telecommunications and power cable infrastructure as a key driver, noting that maintaining advantage in the undersea domain will require combining AI capability with human judgement.
This article appeared in Insights, TNA May/June 2026
| Article Tags | |
| Article Tags | AISubseaAUV |
| Naval Architect Edition | |
| Naval Architect Edition | 2026 |
| General | |
| Preview Text | Researchers at MIT Lincoln Laboratory in the US are developing hardware and algorithms to improve collaboration between human divers and autonomous underwater vehicles (AUVs), with potential applications ranging from subsea cable inspection to countermine operations. The project, carried out by the lab’s Advanced Undersea Systems and Technology Group, seeks to combine the respective strengths of humans and robots in demanding underwater environments.
As principal investigator Madeline Miller notes, divers and AUVs generally do not team up at all underwater. Manipulation tasks requiring human dexterity, such as repairing infrastructure or deactivating a mine, fall entirely to the diver, while |