Mapping the unmappable
Capturing actionable seabed intelligence in environments that defeat conventional survey spreads is forcing a rethink of platform architecture and sensor integration. That was the challenge facing Seaforth Geosurveys while assessing the Arctic seabed for a planned subsea fibre-optic cable installation in Ungava Bay, Canada.
The Nunavik EAUFON-3 project was spearheaded by Sulmara, a global seabed intelligence company, which specialises in capturing and interpreting high-quality offshore subsea data.
Sulmara’s answer was its Discover package, a bespoke technology stack combining a high-resolution 3D synthetic aperture sonar (SAS) sub-bottom system with inertial navigation and positioning sensors.
This was mounted on a specialised remotely operated uncrewed surface vessel (USV) to acquire data, with in-house software used for processing, interpretation and delivery.
Sulmara Discover can be operated both locally and over-the-horizon from a Remote Operations Centre in Glasgow, UK.
For projects such as Nunavik EAUFON-3, platform selection is central. Sulmara chose Ocean Power Technologies’ wave adaptive modular vehicle, WAM-V 16, a USV with an articulated, wave-adaptive frame and shallow draught.
 |
|---|
“The WAM-V 16 USV was chosen for the integration mainly due to its motion compensating frame and versatility as a platform to meet host specifications for our technology,” says Kevin Rychert, principal acoustic scientist at Sulmara.
“Its independent wave compensating hulls allow it to adapt to sea states that would typically shut down smaller USVs’ surveys.”
He adds that the gimbled payload bay provides the stability critical for this type of work. “Other larger USVs don’t have this stability even with roll stabilisers,” he says.
WAM-V 16 is designed for small to medium-sized marine data projects and is a powerful survey tool, whether acting independently or complementing other vessels as a force multiplier.
Modularity and integration
Equally important is modularity. Unlike conventional hulls with fixed payload volumes, the WAM-V architecture allows rapid sensor integration without extensive redesign.
“The modularity of the WAM-V provides a great platform for developments and new technology integration as it is not constrained to small payload bays that are specifically designed to fit within a fabricated hull design,” says Rychert. “This allows us to add and integrate whatever sensors we need, quickly and easily without many architectural constraints.”
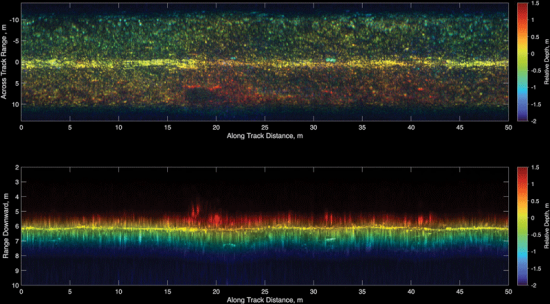
Key to the project was equipping the WAM-V 16 with the EdgeTech Buried Object Sonar System (eBOSS).
eBOSS can produce high-resolution, three-dimensional sub-bottom data across large tidal ranges and it can cope with cable routes littered with boulders above and below the seabed.
Full-volume sub-bottom data set at 5cm resolution is collected across a 120° swathe, enabling rapid coverage over large areas.
Rychert says that no other sonar system available can image the sub-seabed at this resolution, swathe width and depth in real time.
What differentiates the system is the coupling of sensing, navigation and processing. For naval architects, the integration elevates requirements around power management, data handling, onboard computer and communications bandwidth. In this sense, the USV becomes an active node within a distributed sensing network, rather than a passive survey platform.
The design integration is the culmination of years of work through R&D, sea trials and technology integration. “Discover combines the lightest and smallest 3D SAS SBI (eBOSS) on the market with the highest quality INS and GNSS sensors in a uniquely stable unmanned platform,” says Rychert.
The software doesn’t just record data; it integrates with the USV’s autonomous communication capabilities to provide real-time volumetric rendering.
 |
|---|
This allows operators to adjust path based on the quality of the incoming data, ensuring coverage and quality certainty without manual post-processing delays.
Rychert explains that the USV and Sulmara Discover pair so well that they have now been integrated on other variants of the WAM-V, most recently the larger 22ft version.
A changing methodology
The EAUFON-3 project is a benchmark for subsea surveys in general, Rychert says, and signals a methodological shift. Conventional ROV or ROTV surveys maintain a fixed altitude; a surface-mounted system must manage highly variable stand-off distances while maintaining data consistency.
But this survey was different. With water depths shifting dramatically from less than 1m to 20m, the project required continuous sensor adjustment and an entirely new approach to eBOSS data processing.
“As we move to surface-mounted systems, the challenge is interpreting datasets acquired at a dynamic range in a single pass without platform changes,” says Rychert.
A wider application
The WAM-V 16 USV and the Sulmara Discover package have a much wider application across the offshore technology and subsea sectors.
They can be used to survey any buried object such as pipelines and cables, unexploded ordinance, hazardous/lost debris and shipwrecks.
“The aim is to deliver the same insight that end clients need through faster automated, lower cost and higher quality technology and vehicle design methods,” says Rychert.
“Enabling a USV workforce with new emerging technologies can help achieve this in a safer, greener way.
“Discover has the potential to disrupt the subsea survey industry. Adding automation from AI and machine learning to this package further pushes the quality and efficiency we can deliver,” he says.
Projects such as Nunavik EAUFON-3 signal a structural shift in offshore vessel and technology design. Stability is being engineered for sensor performance as much as seakeeping; modularity is becoming essential and autonomy introduces new demands on control systems, redundancy and communications resilience.
Perhaps most significantly, though, the boundary between vessel and payload is dissolving.
Hull form, structural arrangement, power systems and communications architecture must now be conceived as part of an integrated design platform, optimised for data acquisition, processing and transmission, as much as for propulsion.
This article appeared in Subsea surveys, TNA May/June 2026.
| General | |
| Preview Text | Capturing actionable seabed intelligence in environments that defeat conventional survey spreads is forcing a rethink of platform architecture and sensor integration. That was the challenge facing Seaforth Geosurveys while assessing the Arctic seabed for a planned subsea fibre-optic cable installation in Ungava Bay, Canada.
The Nunavik EAUFON-3 project was spearheaded by Sulmara, a global seabed intelligence company, which specialises in capturing and interpreting high-quality offshore subsea data.
Sulmara’s answer was its Discover package, a bespoke technology stack combining a high-resolution |
| Article Tags | |
| Article Tags | AutonomySubsea |
| Naval Architect Edition | |
| Naval Architect Edition | 2026 |