Wargaming Baltic Sentry
NATO established the Baltic Sentry mission in 2025 to address the vulnerability of critical undersea infrastructure in the Baltic Sea. The region contains a dense network of power interconnectors, fibre-optic cables, and seabed installations that have been repeatedly affected by ambiguous or hostile activity.
The accession of Finland and Sweden to NATO transformed the Baltic into an almost entirely Alliance-controlled maritime space, creating both the political impetus and operational requirement for a coordinated, persistent security posture.
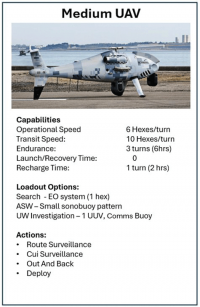
Task Force X (TFX) provides the principal mechanism for integrating maritime uncrewed systems into Baltic Sentry. Its mandate is to deliver scalable USVs, UUVs, and UASs that can augment or substitute for traditional platforms, particularly in the demanding acoustic and environmental conditions of the Baltic. Crewed patrol vessels and maritime patrol aircraft cannot sustain the level of persistence required to monitor multiple infrastructure corridors; TFX assets, by contrast, offer endurance, sensing diversity, and the ability to saturate key areas. Early contributions such as small UAVs, medium UUVs, and basic USVs, provided incremental improvements, while later additions such as interceptor USVs, sail-powered USVs, and containerised towed arrays significantly expanded Blue’s ability to inspect vessels and monitor infrastructure.
 |
|
|---|
The NATO Digital Ocean programme provides the architectural framework for integrating these systems. It aims to create a “persistent, multidomain sensing and data fusion architecture” by combining seabed sensors, autonomous platforms, satellite ISR, and commercial data sources. A major focus is underwater communications, long recognised as a limiting factor in submerged operations. Prototype underwater mesh networks, acoustic modems, and hybrid optical acoustic links were explored during the wargame series, representing early steps towards a distributed, data-centric maritime surveillance model.
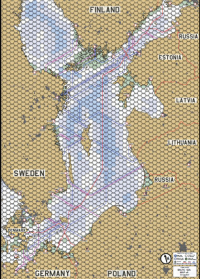
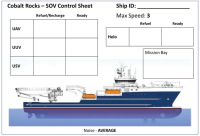
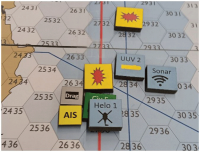
The wargames were conducted using UCL’s Cobalt Rocks ruleset, adapted to model physics-based detection, communications latency, bandwidth constraints and probabilistic classification. Three scenarios were constructed: a 2025 baseline, an initial TFX-enhanced posture, and a future Digital Ocean architecture incorporating an ASW glider barrier. A double blind adjudication model ensured realistic uncertainty, with Blue and Red operating from separate rooms and receiving only information their sensors could plausibly observe. Environmental conditions, endurance limits, and launch and recovery constraints were explicitly modelled, reinforcing operational realism.
Scenario 1 established the baseline. Blue possessed reasonable surface awareness but “almost no persistent subsurface sensing”, enabling Red to use a seabed operations vessel as a decoy while a grey zone merchant vessel severed a fibre-optic cable. The attack went undetected until after the fact, and attribution remained uncertain. The scenario highlighted the difficulty of distinguishing hostile intent from routine commercial activity in a congested maritime environment and showed the vulnerability of the current posture to deception and timing manipulation.
 |
 |
|---|
Scenario 2 introduced initial TFX enhancements. UAVs extended patrol vessel horizons, USVs increased surface domain presence, and medium UUVs provided limited subsurface coverage. Red abandoned at least one planned attack due to the perceived risk of inspection. However, underwater situational awareness remained intermittent, and a Red MUUV successfully exploited a gap in Blue’s patrol cycle. The absence of an underwater comms network meant that even successful detections would not have been reported in time to prevent an attack.
Scenario 3 tested a future architecture featuring a digital underwater mesh network, expanded TFX mass, and an ASW glider barrier. The mesh network enabled near real-time reporting and dynamic tasking of submerged assets. The glider barrier successfully detected a Red SSK, allowing Blue to mount a coordinated non-kinetic response. However, Red’s multivector attack, which combined MUUVs, an XLUUV decoy, and a grey zone merchant vessel, showed that even advanced architectures remain vulnerable to coverage gaps and information environment manipulation. The ‘Visby incident’, in which a merchant vessel severed all fibre-optic cables to the island, illustrated the interplay between physical, legal and informational domains.
Underwater situational awareness remained the dominant limitation across all scenarios, driven by the Baltic’s shallow depths, variable salinity and complex seabed topography. Platform mass and distribution significantly shaped adversary freedom of manoeuvre, but mass alone was insufficient without optimised tasking. Communications proved a critical enabler; the mesh network dramatically improved responsiveness but remained sensitive to node density and environmental conditions. Endurance constraints created predictable windows of vulnerability, repeatedly exploited by Red.
The wargame series demonstrates that future capability development must prioritise persistent seabed sensing, long endurance UUVs, resilient underwater communications, and integrated system of systems architectures. Incremental improvements to individual platforms will not deliver the situational awareness required to protect critical undersea infrastructure in the Baltic Sea.
|
The article above is an abridged version of a paper presented by Professor David Manley from University College London at RINA Warship 2026. |
Under water capabilityThe Warship 2026 conference brought together naval designers, engineers, defence professionals, academics and industry specialists to examine the technologies and strategies shaping future submarine capability.
The theme, accelerating underwater capability through collaboration, ran through a programme covering technology insertion, digitalisation and digital twins, autonomy and human-autonomy teaming, lean crewing, innovative power and propulsion systems, novel materials, survivability, stealth, and quantum technology.
Sessions were drawn from a range of organisations, including BMT, QinetiQ, Siemens Digital Industries Software, Expleo and MARIN, as well as universities such as Adelaide and University College London. The format combined keynote addresses, parallel technical streams, Q&A panels, and roundtable discussions, with a drinks reception and wargaming activity on the first evening. BMT was the event partner. |
|---|

This article appeared in Events, TNA May/June 2026.
| Article Tags | |
| Article Tags | SubmarinesUncrewedWarshipsWargamming |
| Naval Architect Edition | |
| Naval Architect Edition | 2026 |
| General | |
| Preview Text | NATO established the Baltic Sentry mission in 2025 to address the vulnerability of critical undersea infrastructure in the Baltic Sea. The region contains a dense network of power interconnectors, fibre-optic cables, and seabed installations that have been repeatedly affected by ambiguous or hostile activity.
The accession of Finland and Sweden to NATO transformed the Baltic into an almost entirely Alliance-controlled maritime space, creating both the political impetus and operational requirement for a coordinated, persistent security posture.
Task Force X (TFX) provides the principal mechanism for integrating maritime uncrewed systems into Baltic Sentry. Its mandate is to deliver scalable USVs, UUVs, and UASs that can augment or substitute for traditional platforms, particularly in the demanding acoustic and environmental conditions of the Baltic. Crewed patrol vessels and maritime patrol aircraft cannot |